
Contexte
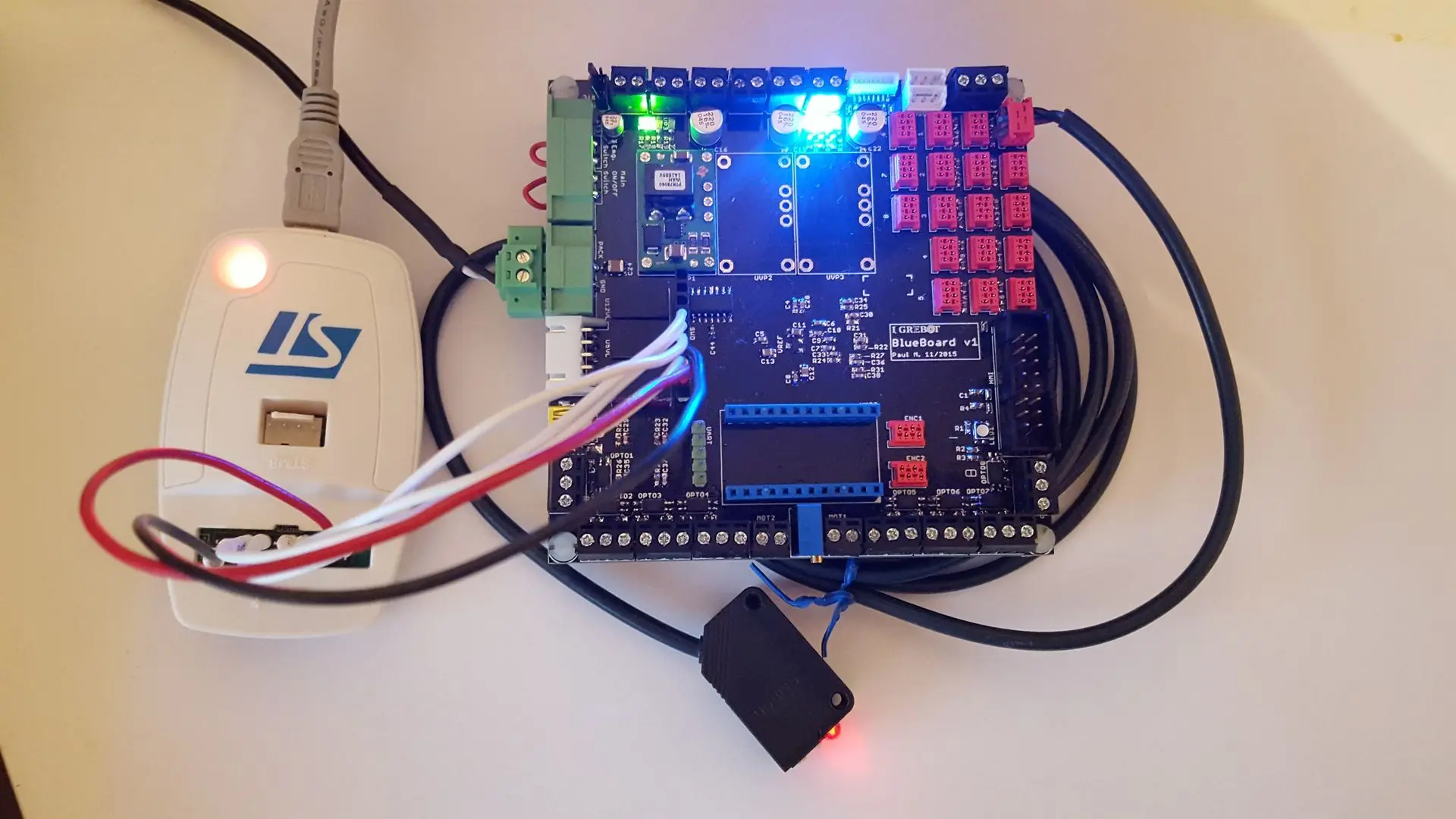
L'objectif du développement de cette carte "blueboard" est de disposer d'une électronique compacte et basée sur une seule carte unique permettant la gestion complète d'un robot autonome. Dans le contexte de la coupe de france de robotique, les développements précédents de l'association Igrebot employaient de multiples cartes (alimentation, gestion moteur, actionneurs ...) ce qui entrainait une certaine complexité de maintenance et un volume important.
Ce projet a permis de disposer d'une électronique facilement duplicable à plusieurs robots autonomes.
Spécifications
- Alimentation:
- Tension d'entrée 14-18V
- Connecteur d'entrée sécurisé pour batterie LIPO-4S
- Connecteur JST pour monitoring des cellules de batterie
- Connecteur pour switch principal ON/OFF
- Tension d'entrée 14-18V
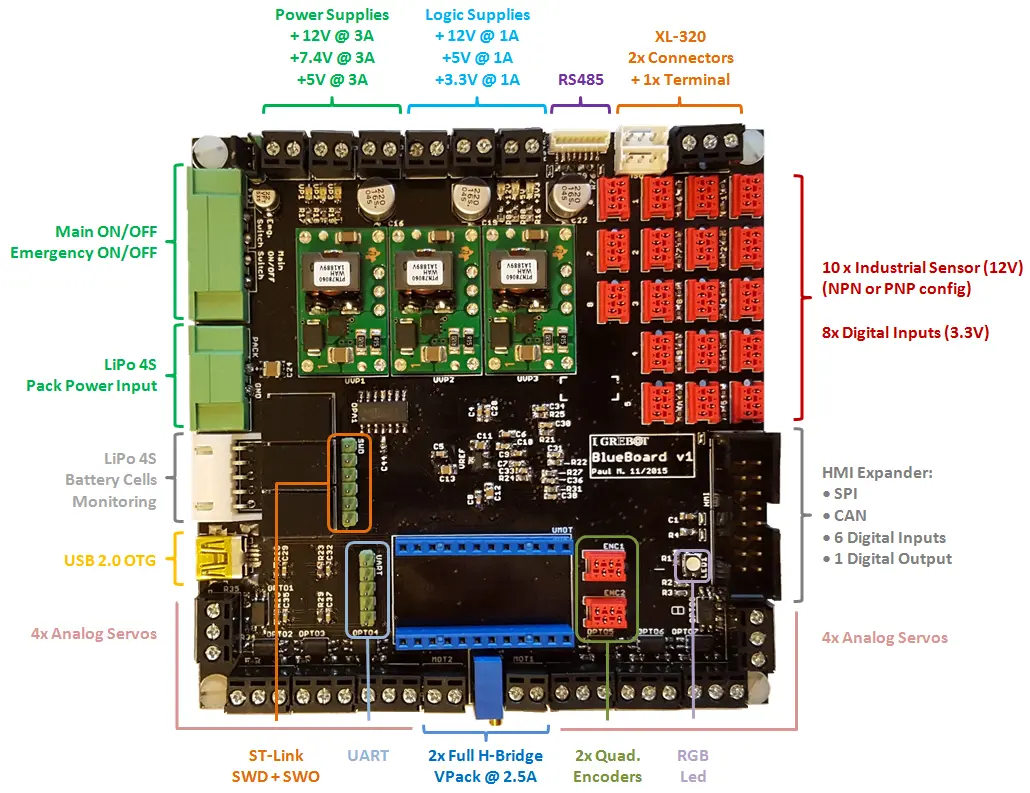
- Interfaces d'alimentations:
- Alimentations de puissance +12V (3A), +7.4V (3A), +5V (3A)
- Alimentations logique ("propres") +12V (1A), +5V (1A), +3.3V (1A)
- Interfaces pour actionneurs de déplacement:
- 2 moteurs DC à balais, pont en H complets jusqu'à 2.5A pic
- 2 encodeurs en quadrature
- 2 moteurs DC à balais, pont en H complets jusqu'à 2.5A pic
- Interfaces pour actionneurs internes et extenes:
- 8x servos analogiques (à PWM)
- 2x bus de servo-moteurs numériques Dynamixel
- 10x entrées de capteurs industriels PNP/NPN
- 8x entrées numériques CMOS 3.3V
- 8x servos analogiques (à PWM)
- Interface d'expansion pour carte HMI:
- SPI et CAN
- 7 GPIOs
- Interfaces de debug
- UART
- ST-link
- USB 2.0 OTG
- CPU puissant STM32H7
Enjeux et challenges
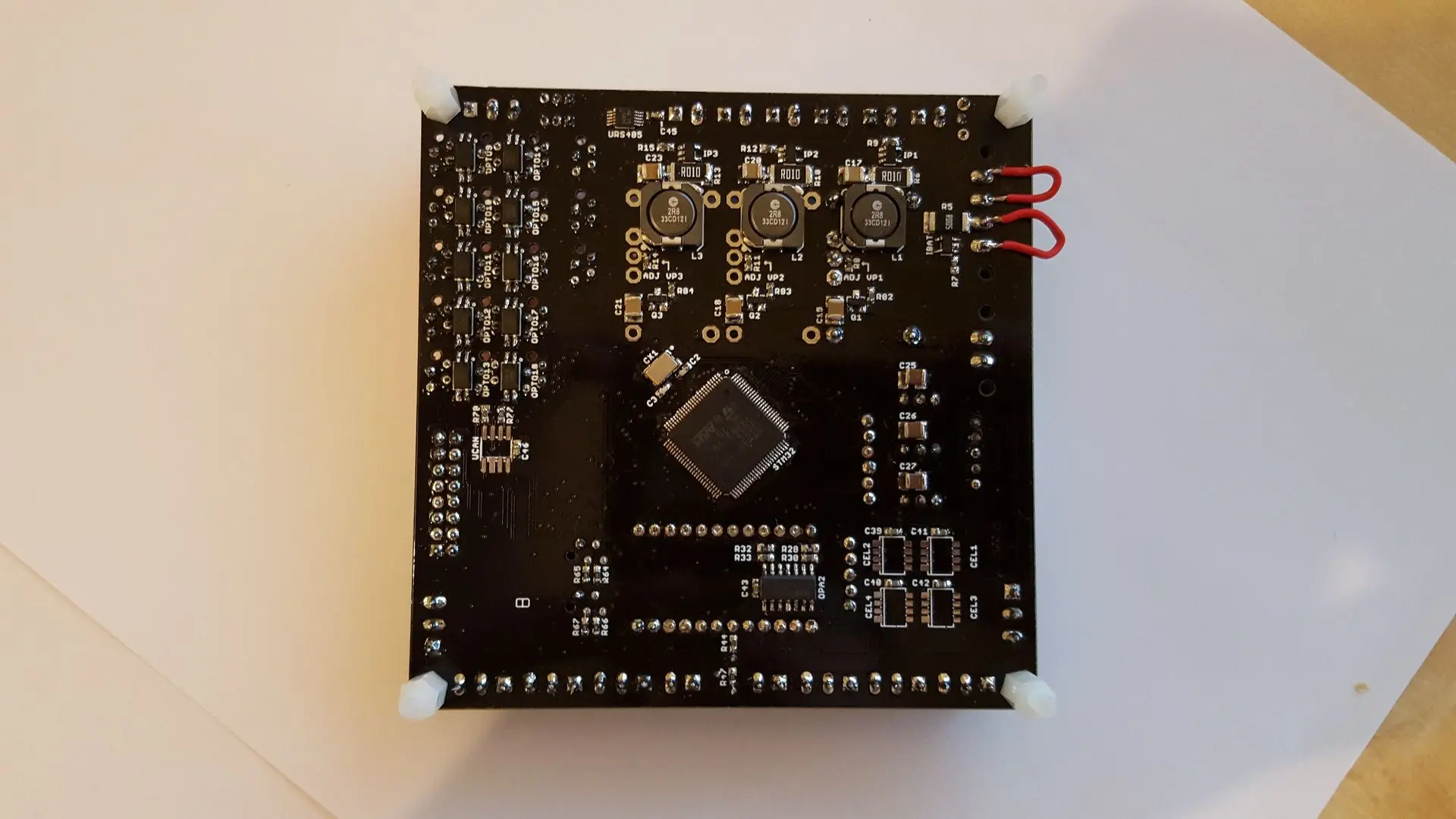
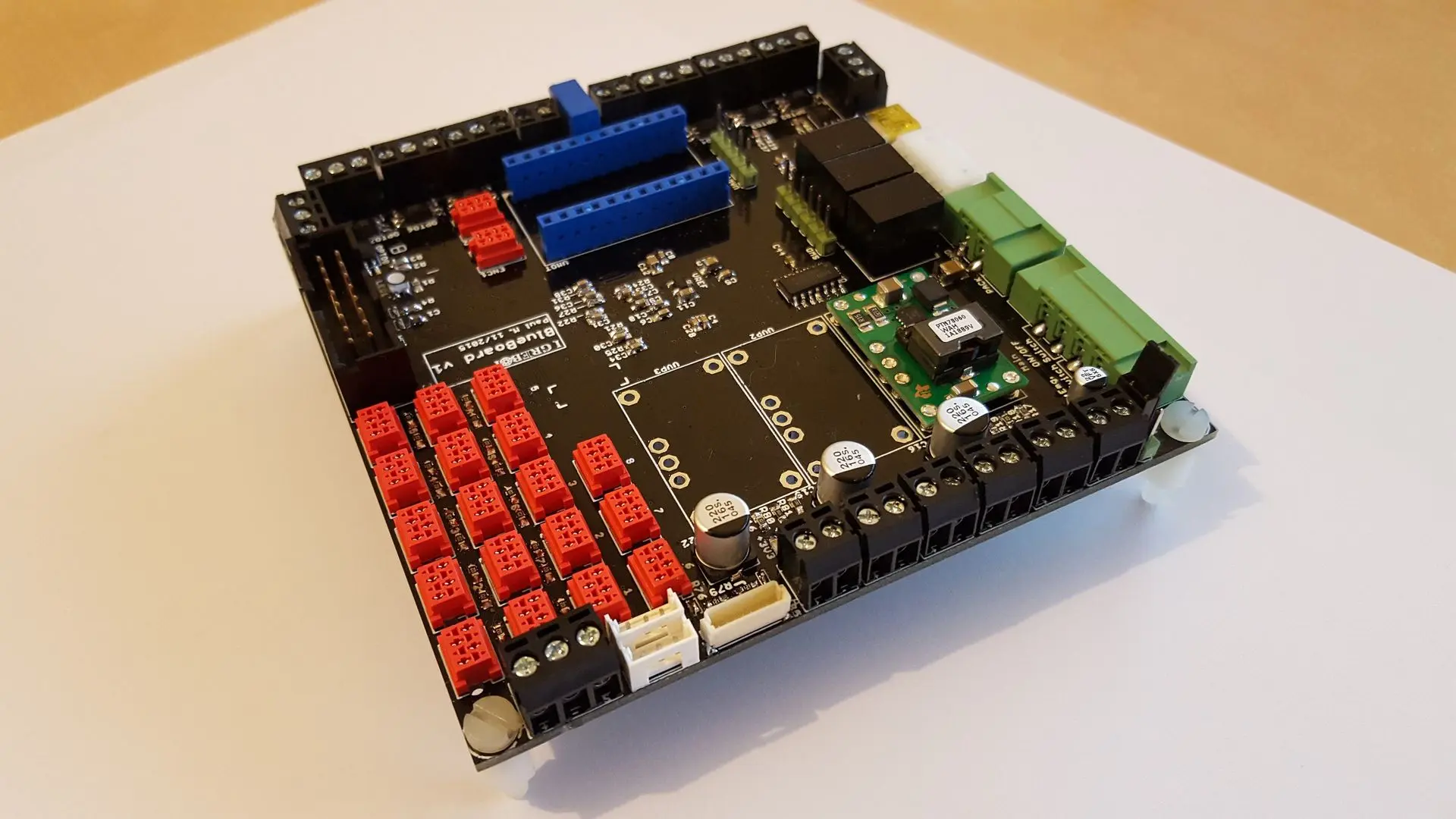
La carte est très compacte et la majorité de la surface TOP est dédiée aux connecteurs. La partie inférieure n'a que des composants CMS afin de simplifier la soudure des composants sur cette face. Compte-tenu du budget serré, le routage a été réalisé en seulement 4 couches ce qui a demandé un temps important. Afin de simplifier la conception, certains blocs fonctionnels sont déportés sur une carte mezzanine:
- Alimentations (modules intégrés TRACO power ou TI)
- Etage de puissance des ponts en H complets (carte mezzanine dédiée)
Réalisation
La liste ci-dessous présente les étapes du projet qui ont été réalisées:
- Analyse / Architecture
- Schéma
- Routage
- Fabrication
- Validation prototype
- Utilisation en contexte applicatif
La carte est fonctionnelle dès la première version de sa fabrication et a pu être utilisée avec succès pendant plusieurs années !