Portfolio
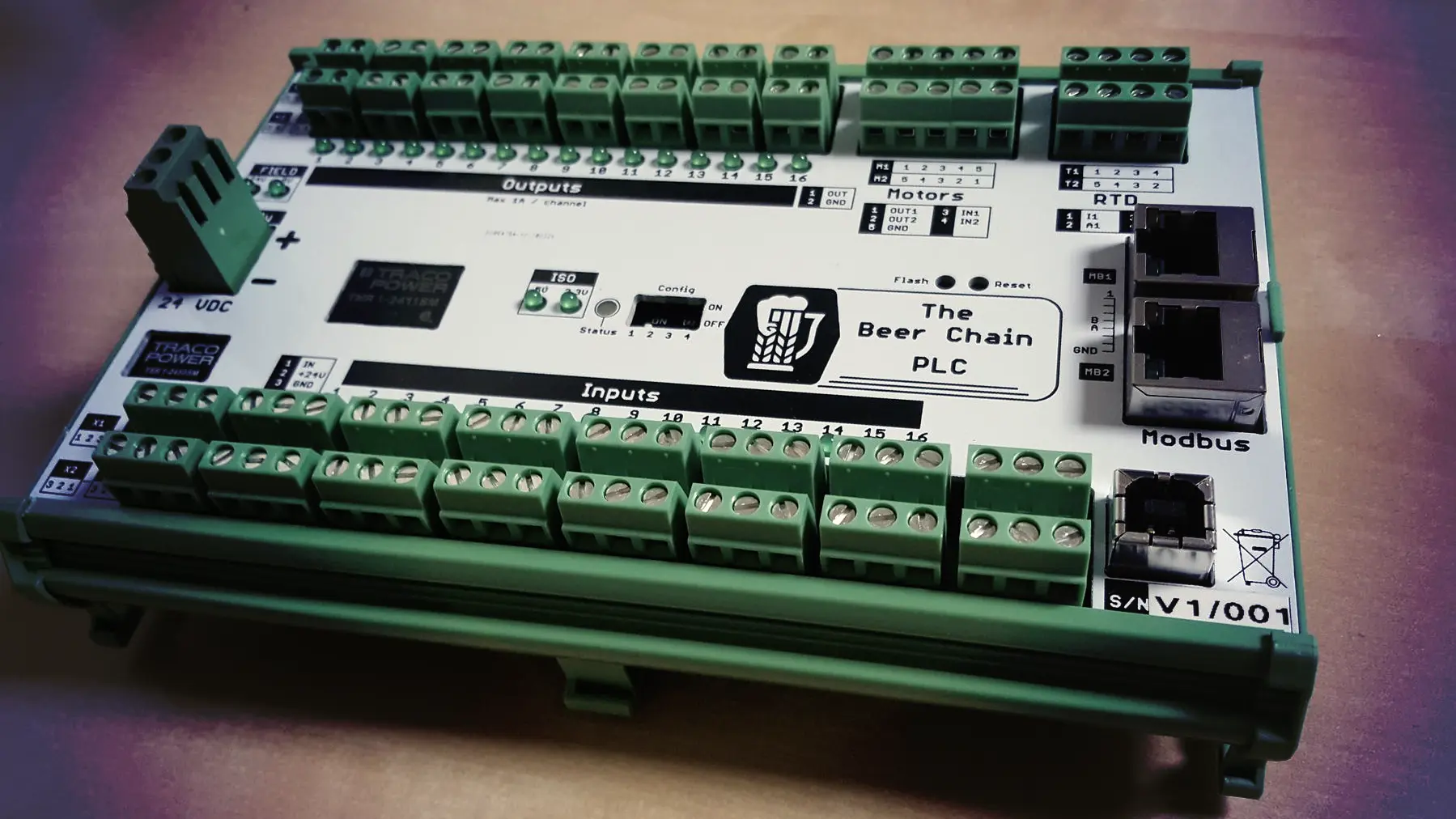
TheBeerChain: Contrôleur PLC
Electronics
Conception d'un automate de contrôle industriel pour une machine d'embouteillage de bières. L'objectif de ce projet était de développer une électronique de contrôle permettant de piloter les différents actionneurs (vannes, moteurs, etc.) tout en récupérant le statut de capteurs industriels. Le contrôleur est conçu avec une isolation galvanique sur les entrées / sorties. Une double interface de communication Modbus RS485 est présente ainsi que de l'USB pour la programmation / debug et monitoring du contrôleur.
Réalisation: 2018
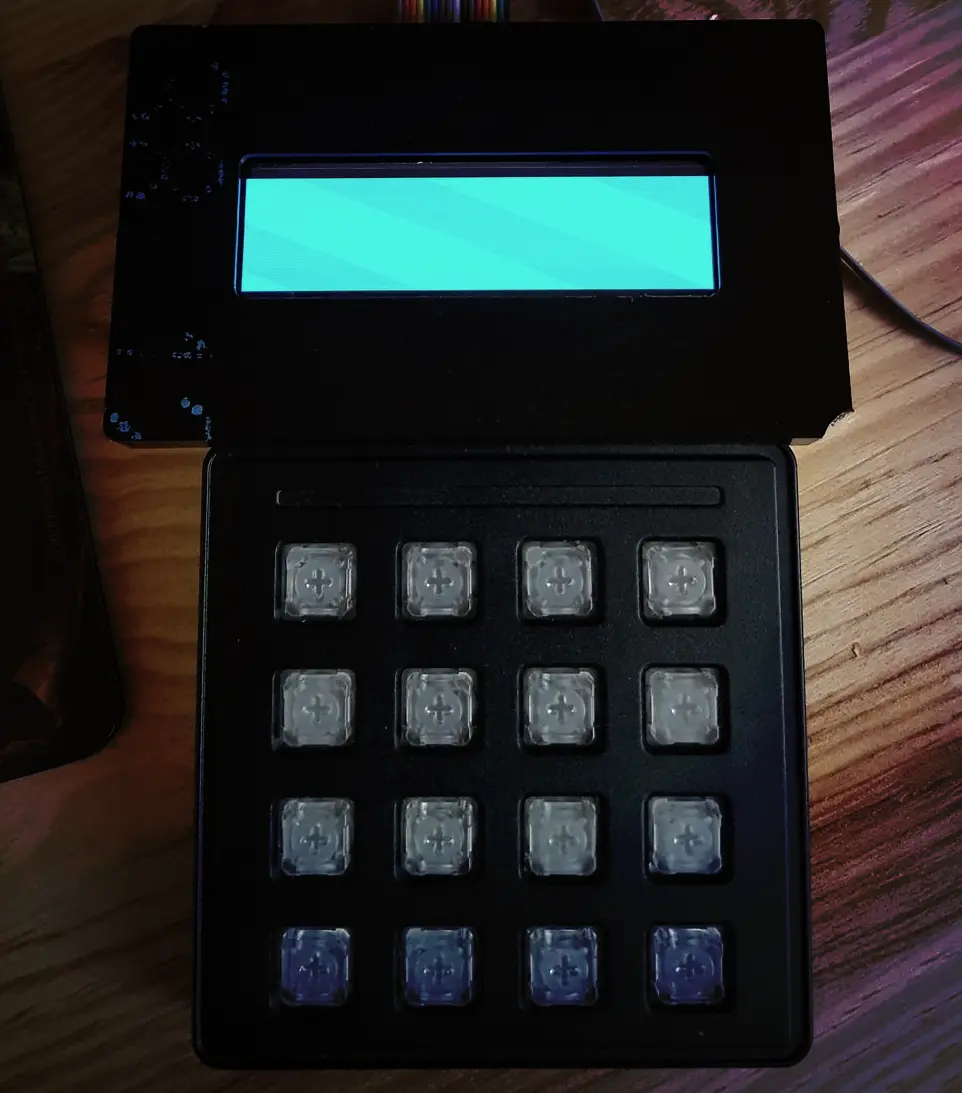
Modbus HMI
Electronics Mechanics
Conception d'une interface Homme-Machine (HMI) compatible Modbus pour une utilisation industrielle avec un indice de protection IP65 (totalement protégé contre la poussière, étanche aux jets d'eau). L'interface dispose d'un écran Oled 256x64 pixels et d'un clavier matrice 4x4. L'interface de communication est du RS485 (compatible Modbus). Ce projet a été développé afin d'être utiliser par le projet "TheBeerChain" (description du contrôleur PLC ci-dessus).
Réalisation: 2018

IMCC: Logiciel d'Interface et contrôle de robot
Python
Développement d'une interface graphique de contrôle et monitoring en python. Utilisée pour de la robotique, cette interface permet de piloter et en temps-réel des systèmes embarqués tout en permettant une visualisation des variables internes (vitesse, accélération, position par exemple). L'interface permet également de capturer l'état des processus internes d'un OS temps-réel embarqué (FreeRTOS) afin de suivre l'évolution et les décisions de l'intelligence artificielle embarquer.
Réalisation: 2017
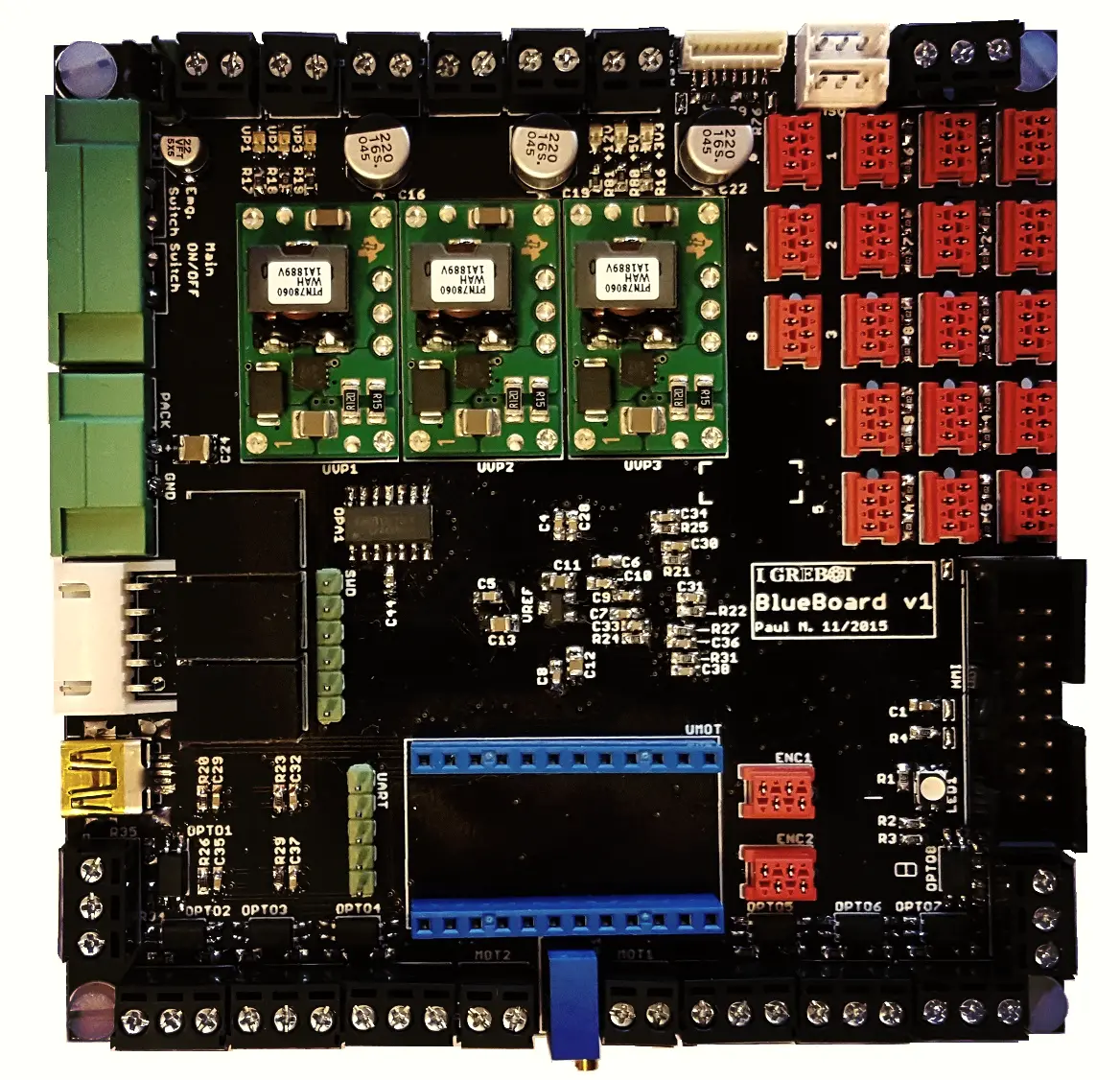
Blueboard: Carte de contrôle de robot
Développement d'une carte de contrôle complète et compacte pour robot. Cette carte intègre les fonction de gestion d'alimentation, monitoring de batterie LiPo 4S, contrôle de 2 moteurs DC, des entrées pour encodeur rotatif, des entrées de capteurs industriels, des GPIO standards. Le STM32 série H très performant permet de faire tourner un OS temps-réel (FreeRTOS) disposant de suffisement de ressources pour gérer l'intégralité des tâches d'un robot et de ses sous-systèmes.
Réalisation: 2016

Microboard HMI: Carte d'interface utilisateur
Conception et réalisation d'une carte d'interface utilisateur. Cette carte dispose d'un écran OLED graphique, d'une molette rotative de navigation (encodeur en quadrature) ainsi que des boutons de navigation. L'écran permet d'afficher un menu de navigation permettant à l'utilisateur d'effectuer des actions ou visualiser des données. Des interfaces SPI, CAN ainsi que des GPIOs permettent de la connecter à un système de contrôle plus global. Un emplacement de carte SD est également disponible afin de facilement charger en mémoire des configurations ou y stocker des données (logs par exemple).
Réalisation: 2015
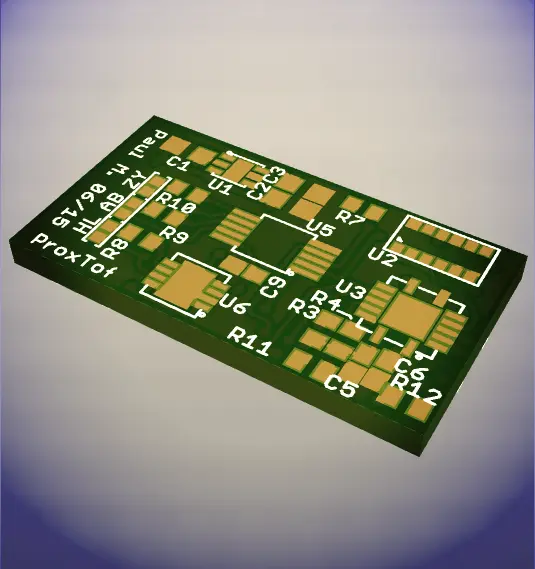
ProxTof: Capteur de proximité ToF
Conception d'une petite carte capteur de proximité basée sur un composée de mesure de temps de vol (Time Of Flight). Cette carte ingère un capteur VL6180X, un petit microcontrôleur PIC18 ainsi qu'une interface CAN. Le microcontrôleur permet de faire des calculs avancés depuis les mesures brutes du capteur, tout en mettant à disposition une interface industrielle. La carte mesure 18.5 x 12 mm².
Réalisation: 2015
IA robotique et vision sur Raspberry PI
Développement logiciel d'un contrôleur et d'une intelligence artificielle de robot sur cible embarquée Raspberry Pi. L'utilisation de cette cible très performante permet également d'utiliser une caméra et des bibliothèque de traitement d'images pour la prise de décision. La communication avec une station externe est facilitée en WiFi. Le développement est fait en C++ et utilise des outils de compilation croisée afin de faciliter le travail.
Réalisation: 2014
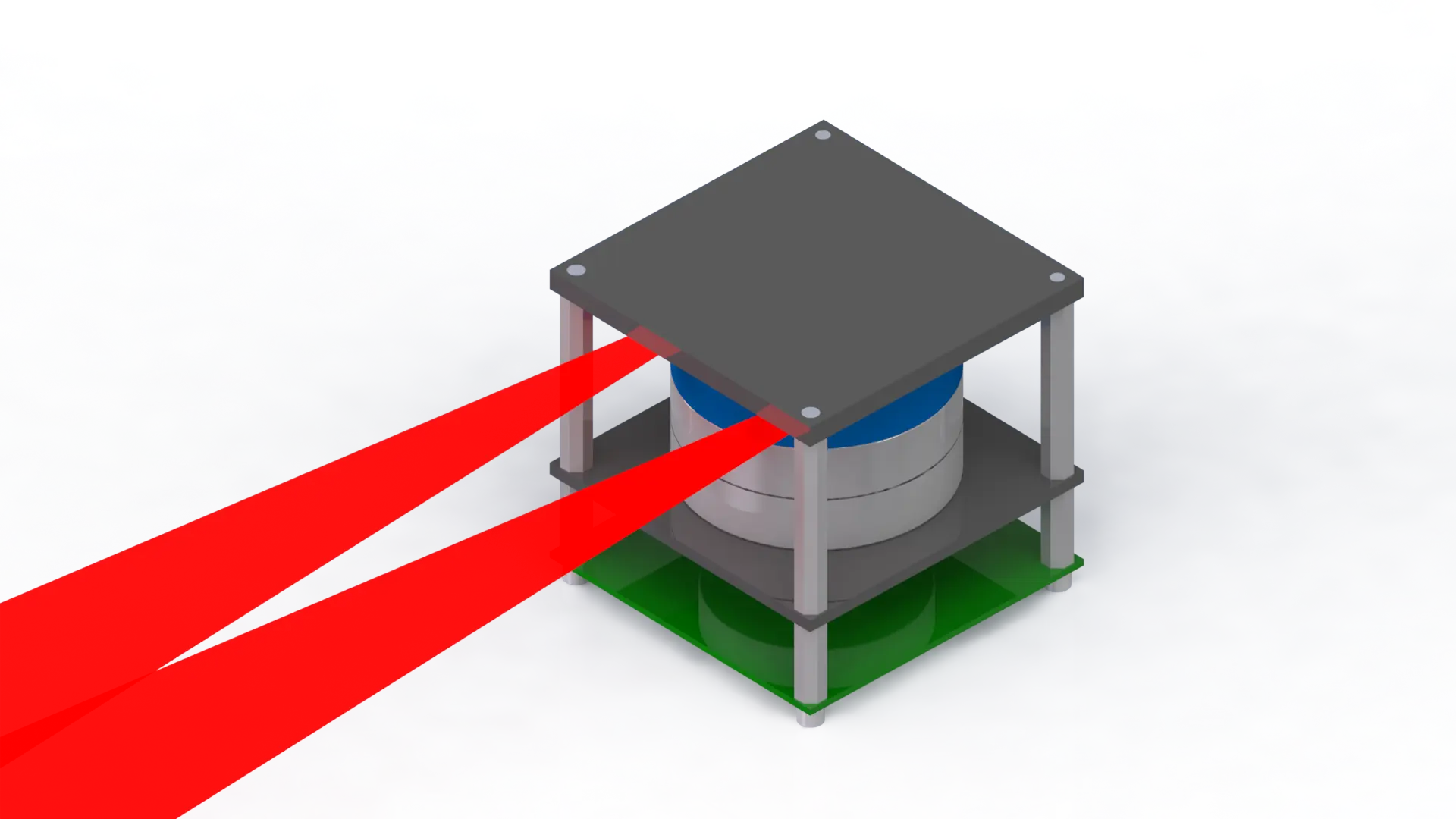
Balises Laser de positionnement absolu
Optics Mechanics
Développement complet d'un système de positionnement absolu avec une précision millimétrique. Ce projet a duré 3 ans et a été conçu en plusieurs étapes. Il consiste principalement en 2 éléments qui peuvent être dupliqués selon les besoin: Une tourelle laser émettrice surmontée de 2 lasers ligne parallèles, et une ou plusieurs balises réceptrices équipées de photodiodes sensibles et rapides. La position absolue (et connue) des balises réceptrices permettent de déterminer de manière fiable la position des tourelles. Cela est rendu possible (entre-autre) en mesurant le temps de passage des lasers (celui-ci dépends de la distance).
Réalisation: 2012
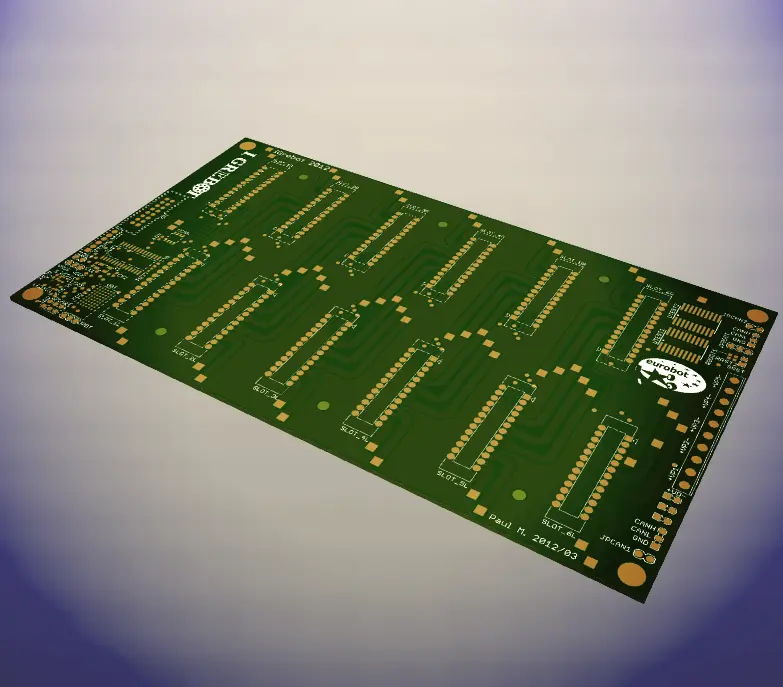
Igreplane: Carte fond de panier
Conception d'une carte fond de panier modulaire permettant la distribution d'alimentations principales, d'un bus CAN et de diverses GPIOs. La carte intègre également un "bridge" CAN vers UART/RS232 (via USB) permettant l'inspection et le monitoring en temps réel des trames échangées.
Réalisation: 2012

WordClock: Horloge textuelle
Mechanics
Ce projet est inspirée d'une oeuvre d'art et reproduit à l'identique une horloge "textuelle", où l'heure est affichée par des mots et non par des chiffres. La conception électronique est relativement simple et met en œuvre des rubans de led RVB. L'intégralité de la conception électronique et firmware embarqué est réalisé par mes soins ce qui a permis une personalisation des modes d'affichage (monochrome, une couleur par mot, mode arc en ciel, etc.).
Réalisation: 2011
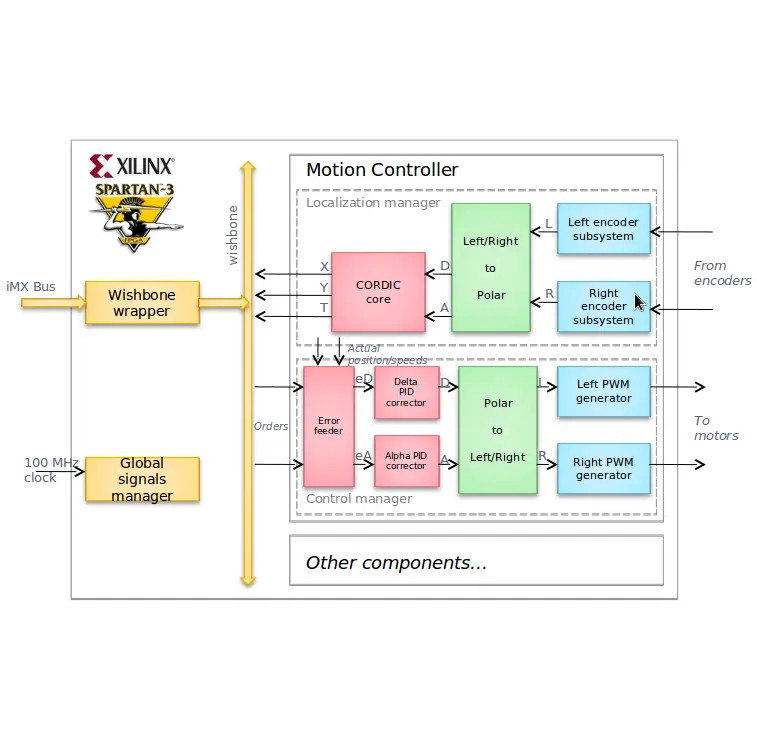
ELDER: Contrôleur de déplacement de robot
VHDLCe projet met en œuvre un système électronique Armadeus APF51, utilisant un processeur Freescale IMX couplé à un FPGA Xilinx Spartan6. Le FPGA agit comme co-processeur en partageant le bus mémoire du CPU. Le but de ce projet était de développer un composant en logique programmable dédié au contrôle de position et déplacement d'un robot. L'implémentation dans le FPGA assure une mesure et un asservissement temps-réel, alors que le CPU permet de faire tourner un linux embarqué temps-réel pour les tâches plus complexes.
Réalisation: 2010
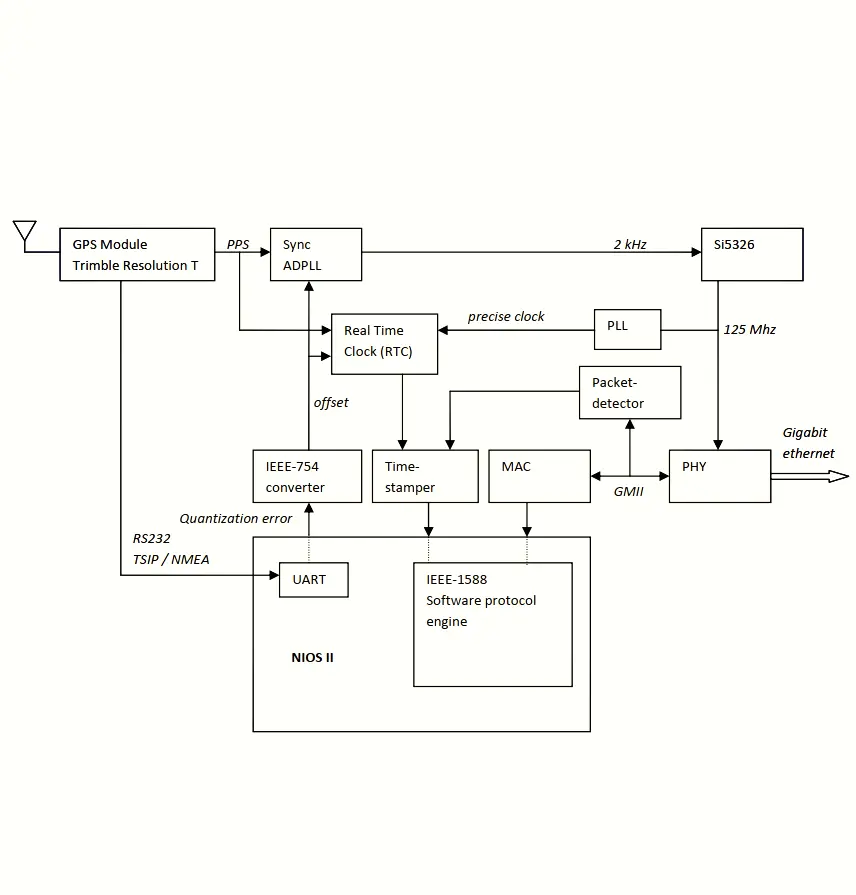
Horodatage haute précision IEEE-1588
C FirmwareVHDL
Conception en logique programmable (VHDL) sur cible Altera Stratix d'un système d'horodatage (timestamp) d'une précision de quelques dizaines de nanosecondes. L'objectif est de pouvoir dater très précisement la date d'arrivée et de sortie de paquets Ethernet sur plusieurs systèmes FPGA. Le système utilise une impulsion PPS (Pulse-Per-Second) émis par un récepteur GPS dont la source est issue d'une horloge atomique. Depuis cette impulsion, une horloge haute fréquence à 125 MHz est créée grâce à l'utilisation en cascade d'une ADPLL et DSPLL. Cette horloge sert ensuite de référence pour la propagation de l'horloge utilisée par le standard IEEE-1588.
Réalisation: 2009